从伺服系统来看如何提升机器人的轨迹精度 公开课笔记
本文共 45 字,大约阅读时间需要 1 分钟。
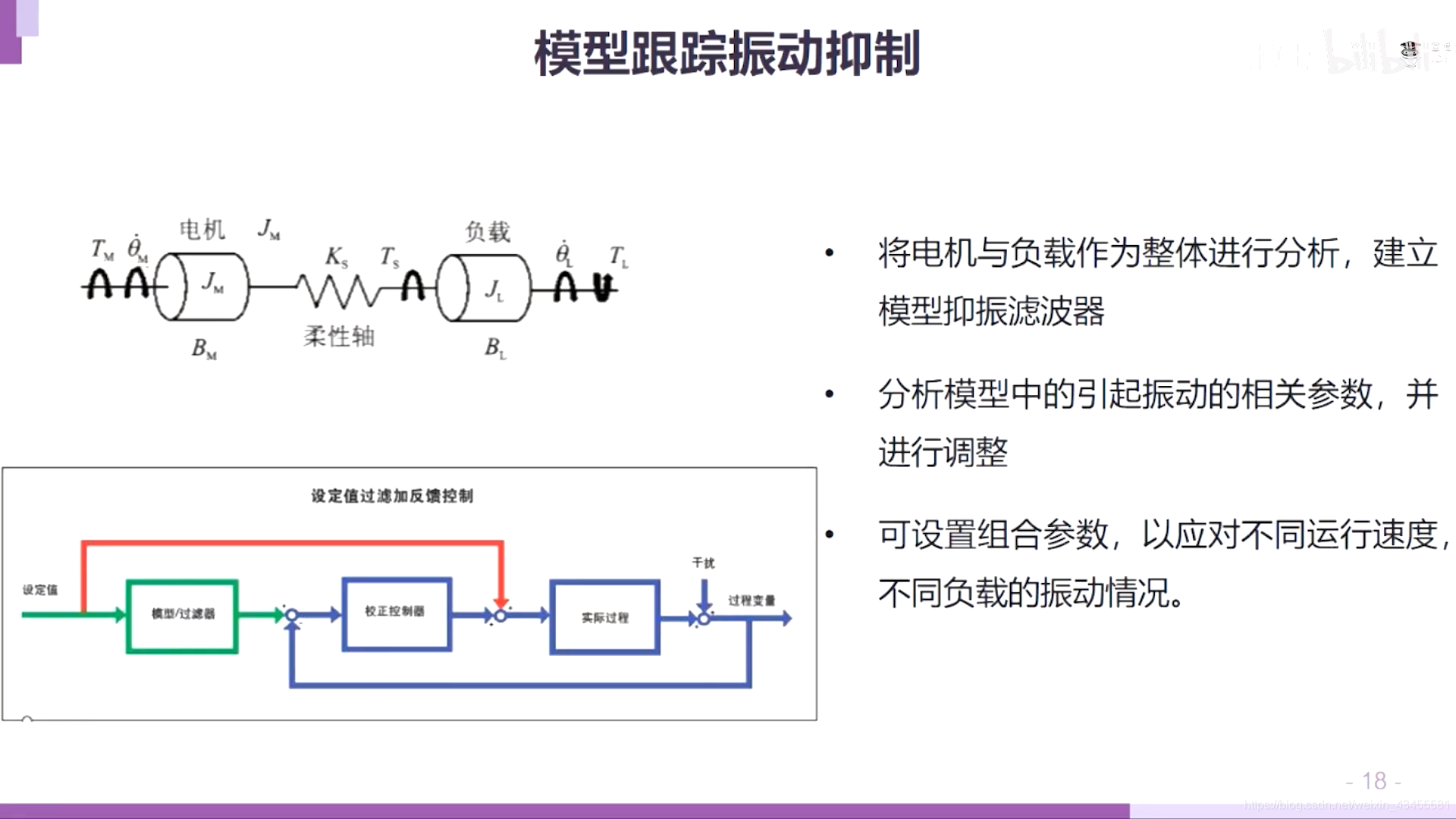
声明:本文所有图片均截自bilibili堂博士UP上传的公开课,仅作为个人笔记记录,侵删~
转载地址:http://cyzxf.baihongyu.com/
你可能感兴趣的文章
MTK socket 小结 2
查看>>
MTK socket 小结 4
查看>>
MTK socket 小结 3
查看>>
MTK socket 小结 1
查看>>
断点下载的两种实现
查看>>
MTK中的tick时间相关函数(转)
查看>>
输入法
查看>>
MTK平台输入法
查看>>
MTK手机驱动培训资料
查看>>
MTK系统错误类型
查看>>
MTK异常处理流程
查看>>
MTK编程起步——开发中可能用到的一些东西
查看>>
mtk theme颜色配置[转]
查看>>
MTK常用Trace函数(转)
查看>>
MTK编程起步——常用函数及宏定义
查看>>
MTK 内存管理
查看>>
PhoneBook中所用到的数据结构及其作用(MTK)【转】
查看>>
53的电话簿快速查找界面
查看>>
MTK层相关应用集合
查看>>
MTK中的tick时间相关函数
查看>>